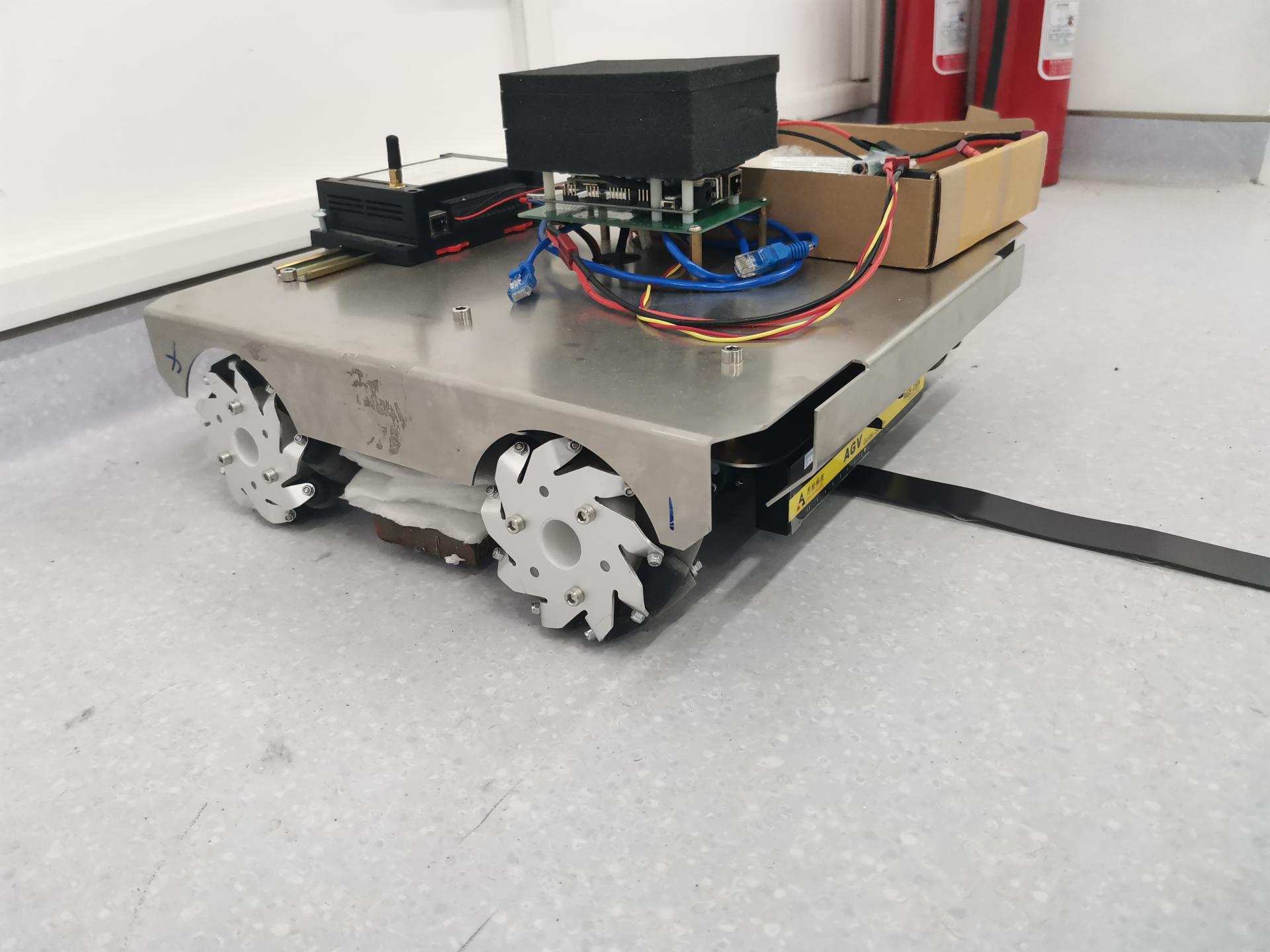
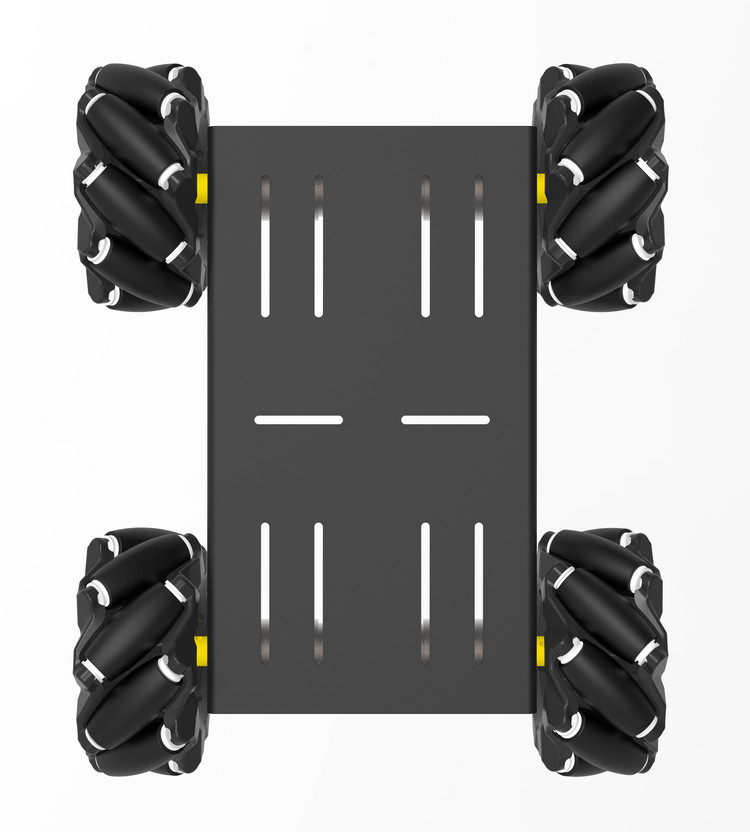
本移动平台采用对称布置的四个麦克纳姆轮设计,可以实现二维平面的自由运动。其底盘的结构实验如下图所示。
平台使用12V动力电池供电,选用了4个额定电压为12V的Faulhaber电机+12cm的麦克纳姆轮,搭载了STM32H743高性能ARM控制器、激光雷达、磁导航传感器。可完成的实验项目有:
1)电机运动控制实验,学习的知识点:STM32编程,电机驱动,转速闭环反馈
2)全向移动机器人控制实验,学习的知识点:全向移动机器人运动学控制,三自由度运动
3)基于磁引导线的路径跟随控制实验,学习的知识点:移动机器人路径规划与跟随控制,路径点识别方法
4)基于SLAM的轨迹跟踪控制实验,学习的知识点:激光SLAM建图,全局轨迹跟踪控制,控制算法实验
本实验设备可以用于电气工程及其自动化、机器人工程、物联网工程、电子信息工程专业的实习实训、开放性实验、学生自主创新。